DEAを用いた非拘束回転システム
DEAホイール
概要
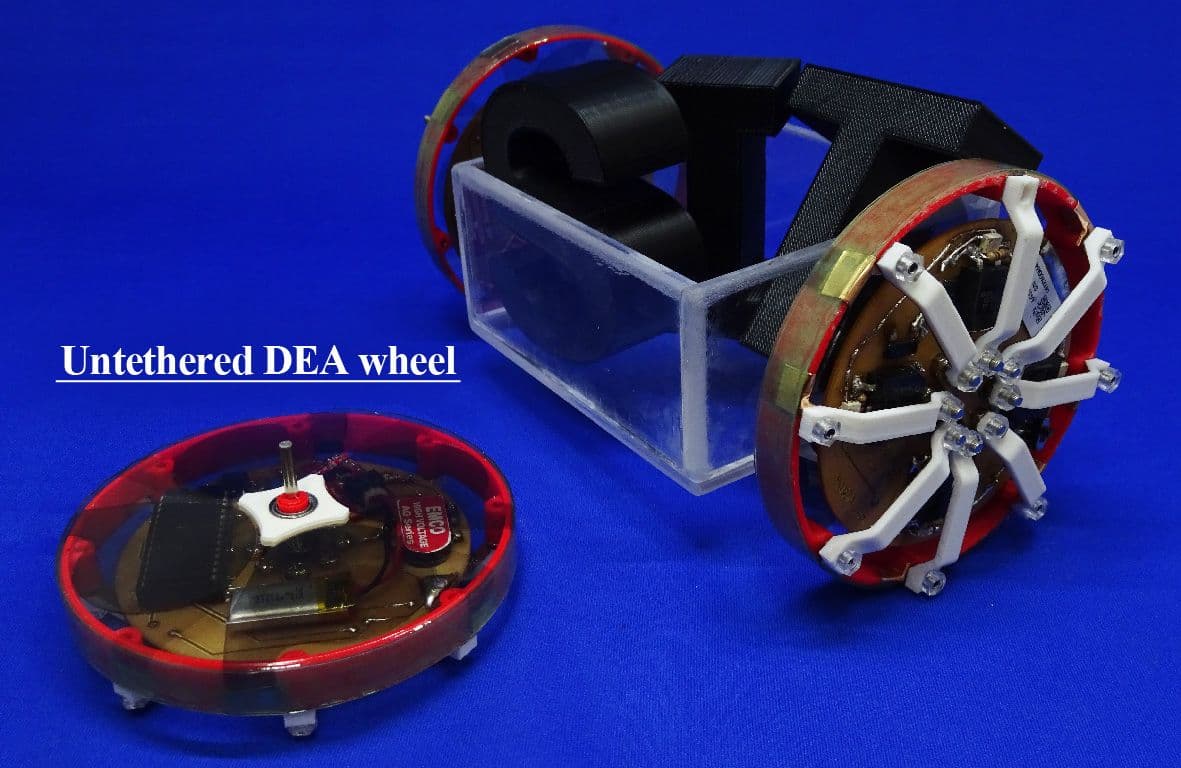
DEAホイールは、誘電エラストマアクチュエータ(DEA)を用いた非拘束(Untethered)回転システムであり、従来の駆動機構とは異なる柔軟で軽量な運動生成を実現する新しい概念のデバイスである。電源や外部配線に依存しない構成を目指すことで、ソフトロボティクスや自律移動体における新たな応用が期待されている。
DEAの大変形特性と高エネルギー密度を活用することで、柔軟構造の変形を直接回転運動へと変換できる点が特徴であり、生体模倣型ロボットや新しい移動機構の研究において重要な役割を果たす。
動作原理
DEAホイールの動作は、誘電エラストマの電気機械変換特性と構造的な非対称性を組み合わせることで実現される。
基本的な構成では、ホイール内部または周囲に配置されたDEAユニットに電圧を印加することで局所的な変形が生じ、その変形が接地条件の変化や重心移動を引き起こす。この結果として回転運動が生成される。
動作は以下のプロセスで進行する:
-
電圧印加
特定のDEAユニットに電圧を印加し、局所的な変形を発生させる -
形状変化
ホイールの一部が膨張または収縮し、接地半径や接触状態が変化する -
推進力生成
接地条件の非対称性により、回転方向の力が発生する -
周期駆動
複数のDEAユニットを順次または組み合わせて駆動することで、連続的な回転運動を実現する
このように、剛体回転ではなく「変形を利用した回転」という点が従来のホイールとの大きな違いである。
特徴
DEAホイールは以下の特徴を持つ:
- 非拘束駆動(Untethered)
外部配線に依存しない自律的な動作が可能 - 柔軟構造による運動生成
剛体機構を用いず、材料の変形のみで回転を実現 - 軽量性
主に高分子材料で構成されるため軽量 - 静音性
摩擦部品が少なく静かな動作が可能 - 新規な移動原理
接地半径変化や重心移動を利用した独自の推進機構 - 高い設計自由度
構造設計により多様な運動モードを実現可能
応用と展望
DEAホイールは以下の分野での応用が期待される:
- ソフトロボットの移動機構
- 小型自律ロボット
- 医療用デバイス
- 生体模倣システム
一方で、実用化に向けては以下の課題がある:
- 高電圧駆動の必要性
- 駆動効率の向上
- 制御手法の確立
- 長期耐久性
今後は、材料開発や駆動回路、制御アルゴリズムの進展により、より高性能で実用的なDEAホイールの実現が期待される。